NWC BQM-108
In 1975/76, the Naval Weapons Center built an unmanned VATOL (Vetical Attitude Take-Off and Landing) research vehicle designated XBQM-108A. The first successful tethered hover was demonstrated in September 1976, but the program was then terminated before any free-flight hovers or conversions to and from horizontal flight could be made.
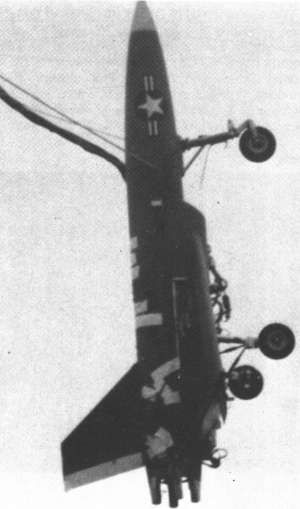 |
| Photo: U.S. Navy |
| XBQM-108A |
The XBQM-108A consisted of the fuselage and vertical tail of an MQM-74A Chukar target drone and new delta wings and small foreplanes. The exhaust of the Teledyne CAE J402 turbojet engine was modified with a vane-type thrust-vectoring control system. Although the XBQM-108A was to land vertically on its tail, the parachute recovery system of the MQM-74A was retained for emergencies. The radio command guidance system was also unchanged from the MQM-74A. For hovering control, the XBQM-108A was equipped with the guidance unit and radar altimeter of the AGM-84A Harpoon, which controlled the thrust-vectoring vanes and the engine thrust.
Specifications
Note: Data given by several sources show slight variations. Figures given below may therefore be inaccurate!
Data for XBQM-108A:
| Length | 3.58 m (11 ft 91 in) |
| Wingspan | 2.21 m (7 ft 3 in) |
| Diameter | 36 cm (14 in) |
| Weight | 254 kg (560 lb) |
| Speed | 740 km/h (400 knots) |
| Endurance | 30 min |
| Propulsion | Teledyne CAE YJ402-CA-400 turbojet; 2.93 kN (660 lb) |
Main Sources
[1] Kenneth Munson: "World Unmanned Aircraft", Jane's, 1988
Back to Current Designations Of U.S. Unmanned Military Aerospace Vehicles
Back to Directory of U.S. Military Rockets and Missiles
Last Updated: 18 October 2002